Hi there,
I’ve just resurrected an old Magni Silver, board revision 5.2
I think we may have damaged some circuitry on the board.
The system boots up, but when the motor node runs I get the following output:
[ INFO] [1729136746.357499547]: Delay before MCB serial port initialization
[ INFO] [1729136751.360527417]: Initialize MCB serial port '/dev/ttyAMA0' for 38400 baud
[ INFO] [1729136751.362643839]: MCB serial port initialized
[ WARN] [1729136751.543206036]: Motor power has gone inactive. Most likely from ESTOP switch active
[ WARN] [1729136751.543359332]: Encoder Resolution: 'Enhanced'
[ WARN] [1729136751.543415425]: Wheel type is: 'standard'
[ WARN] [1729136751.543456110]: Drive type is: '2wd'
[ WARN] [1729136751.543497147]: Wheel direction is: 'standard'
[ INFO] [1729136751.543679498]: Firmware version 45
[ INFO] [1729136751.563980016]: Requesting Firmware daycode
[ INFO] [1729136751.564093423]: Initializing MCB
[ INFO] [1729136751.564146441]: Host is specifying wheel_type of 'standard'
[ INFO] [1729136751.564196663]: setting MCB wheel type 0
[ INFO] [1729136751.584388273]: Setting Wheel gear ratio to 4.2940 and tics_per_radian to 41.0039
[ INFO] [1729136751.584472403]: Wheel gear ratio of 4.294 will be used.
[ INFO] [1729136751.584521273]: Host is specifying drive_type of 'standard'
[ INFO] [1729136751.584566569]: setting MCB drive type 0
[ INFO] [1729136751.604743920]: Firmware default wheel_direction will be used.
[ INFO] [1729136751.604817753]: Firmware is version 45. Setting Controller board version to 51
[ INFO] [1729136751.604870587]: setting hardware_version to 33
[ INFO] [1729136751.625044826]: Firmware is version V45. This meets the recommend minimum firmware versionof V43
[ INFO] [1729136751.645215159]: reading MCB option switch on the I2C bus
[ INFO] [1729136751.645849898]: Setting firmware option register to 0x82.
[ INFO] [1729136751.645918620]: setting MCB option switch register to 0x82
[ INFO] [1729136751.666106194]: setting MCB system event register to 0
[ INFO] [1729136751.686304359]: setting Estop PID threshold to 1500
[ INFO] [1729136751.706537617]: setting estop button detection to 1
[ INFO] [1729136751.726736746]: setting max motor forward speed to 104
[ INFO] [1729136751.746930949]: setting max motor reverse speed to -104
[ INFO] [1729136751.767122985]: Initialization of MCB completed.
[ INFO] [1729136751.767186188]: setting MCB system event register to 0
[ WARN] [1729136751.807449594]: Setting PidParam P to 5000
[ WARN] [1729136751.829892237]: Setting PidParam I to 0
[ WARN] [1729136751.852222398]: Setting PidParam D to -110
[ WARN] [1729136751.874526338]: Setting PidParam V to 0
[ WARN] [1729136751.896799426]: Setting PidParam Denominator to 1000
[ WARN] [1729136751.919074661]: Setting PidParam D window to 10
[ WARN] [1729136751.941406027]: Setting PidParam max_pwm to 325
[ WARN] [1729136751.963686596]: Setting PidParam pid_control to 0
[ INFO] [1729136751.965918499]: Starting motor control node now
[ INFO] [1729136751.966059536]: Firmware date 0x20231105 (format 0xYYYYMMDD)
You can see that the node is talking to the firmware, but the firmware is reporting that the Estop is on and so the motor power is off.
However, the E-Stop is definitely not on, the red e-stop motor light is enabled. So I think there could be a problem with the motor boards circuitry.
Do you have any ideas for what I could double check? I looked at the fuse at the bottom of the board but it appears to be fine. Are there any other fuses on the board I can inspect?
A few extra details:
I notice that on the main board there is a tiny blue led that says motor power.
When I move the wheels the back emf makes it light up briefly, but even with the estop button pushed in that led is not lit
Thank you for the detailed print out of the error reporting
The fact that you get “Firmware version 45”
Indicates that the motor controller micro-controller is talking to the rest of the robot correctly and that you have up to date firmware. It means that the power supplies are almost certainly working.
Just to double check the power supplies, there are 5 lights that are right above the connection point for the switch board (that funny shaped board with the charging port and two switches on it) 4 of these should solid on all the time (and indicate all 4 power supplies on the robot are working) and one should blink briefly every few seconds (indicating the uC is alive).
- Please confirm that those are all OK
The power on the motor controller is split between low intensity systems such as the digital systems and the gate drivers and the high intensity systems - the gates that drive the motors and of course the motors themselves. The small blue light not being active does mean that you aren’t getting power to this high intensity system. When you move the motors back and forward you induce current in to the system and by design it drains away safety through that LED.
There is an ECB system that can supply power to the high intensity systems and the ECB takes its signal from the switch board. There is a small red button on the switch board and behind this red button there is a connector which can be used to connect an E-Stop all these circuits must be closed for the ECB to provide power to the high-intensity systems. If either the E-Stop switch is pressed in, or the red button is pushed in or there is a loose connection anywhere the system will denergize the power to the motors. In essence any break in the safety wire causes the power to the motors to be cut. This is a feature, not a bug. You can place multiple E-Stop switches daisy chained around the robot and pressing any one causes the power to be cut from the motors. So the next troubleshooting steps are:
- Confirm the red button is out
- Confirm there is either a short cable for the connector behind the red button that is correctly shorting the two pins or an E-Stop button is connected somewhere that is out and shorting the cable.
- Confirm the red light on the switch board is on
- Confirm that the switch board is correctly seated on the main control board (MCB) this is really really easy to get wrong even though the connector is shrouded and tabbed its still possible to plug it in 0.1 inch over and cause problems.
If those are all OK and you are sure you are getting a positive signal to the ECB then most likely the problem is the ECB chip itself a problem we’ve not seen. Let me know and we will find a way to take care of you.
1 Like
Thanks David,
I appreciate your help.
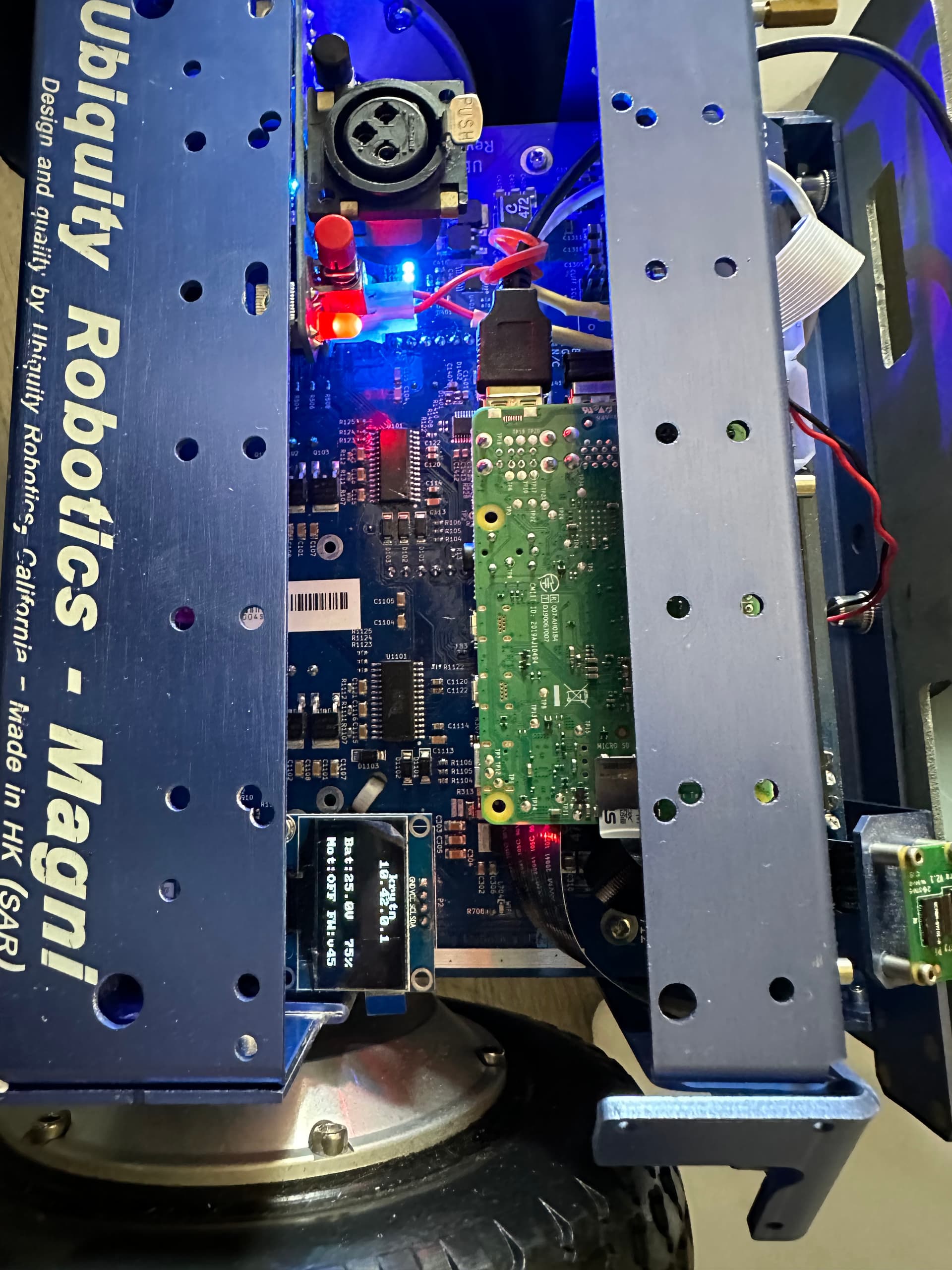
- Yes I can confirm all 5 led’s are on, one blinks (see picture).
- Yes, the red button is pushed out.
- Yes, I actually have two estops daisy chained on the switch, I can confirm that they are shorting the link. (Hitting either of them causes the red light to turnoff).
- The red light on the switch board is on.
- I do believe its correctly seated. I’ve tried reseating it multimple, and I don’t get any different effect.
See attached: picture of 5 leds, and an overall picture of the front of the robot
I also read on the forum somewhere that disconnecting the battery overnight can help. So we did that last night. Unfortunately, still no motor power.
Also, I notice that there is some motor resistance (but the wheels aren’t locked), yet this resistance isn’t there when I turn off the system completely.